Voilà un des projets les plus sympathiques qu'il m'a été donné de réaliser pendant mon cursus scolaire, le sujet était : "Modélisation 3D d'un bras robot avec un comportement réaliste"
Ce projet s'est fait en binôme, et c'est pourquoi je passe un grand bonjour à mon cher ami Benoît, aka Michal, qui a créé toute la partie "moteur physique" du robot, alors que je me suis essentiellement penché sur l'aspect graphique.
Les fonctions 3D utilisées sont des fonctions OpenGL.
Un des seuls regret que j'ai, est de ne pas avoir eu le temps d'inclure des pixels et vertex shaders pour générer les ombres du robot, mais ça ne change pas grand chose au plaisir que j'ai eu à coder en OpenGL.
Le mode d'emploi, pour essayer cet exécutable, est toujours le même. Il vous suffit de copier le contenu de ce fichier zip dans un dossier et de lancer la machine 
- Les flèches "haut" et "bas" font baisser tout le bras
- Les flèches "droite" et "gauche" font tourner l'ensemble
- Alt + flèche "haut" ou "bas" ouvrent ou ferment la pince
- Shift + flèche "haut" ou "bas" font monter ou baisser la partie centrale du bras.
- Ctrl + flèche "haut" ou "bas" font monter ou baisser la partie haute du bras.
- Vous pouvez aussi utiliser la souris, en maintenant le click droit pour changer de point de vue.

PS : Les mouvements du bras robot sont tracés dans un fichier texte, donc ne vous inquiétez pas de ce nouveau fichier, et n'hésitez pas à la supprimer après chaque utilisation. 
Au cours de notre cursus scolaire, plusieurs projet nous ont été soumis et voici un des sujets qui m'a le plus amusé.
Je me suis essentiellement occupé de la partie codage de l'application, ma collègue Houda, elle, s'est occupée de toute la partie documentation.
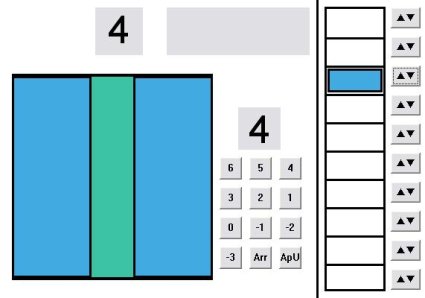
L'intitulé était le suivant : "Réalisez un simulateur d'ascenseur suivant un modèle uml précis". Cette application a été développée en C++, avec une interface graphique OWL sous Borland C++ 5.02.
La seule chose qu'il faut savoir pour faire fonctionner ce simulateur est qu'il est fourni avec un fichier texte de configuration qui contient deux nombres significatifs:
- le premier nombre représente le nombre d'étages au total.
- le deuxième nombre représente le nombre d'étages en négatif.
Il vous suffit donc de copier ce petit executable avec toutes le dlls au même endroit que le reste, et en avant.
Voici un petit aperçu:
N'hésitez pas à me contacter si vous voulez en savoir plus.

Ce programme a été développé en C++ et est le résultat d'un projet que lequel j'ai travaillé durant mon cursus scolaire.
La demande était simple : "Réalisez un système de particules prenant appui sur un codage objet combiné à OpenGL"
Ce systèmes est donc composé de deux objets : le système (la base d'où sortent les particules) et la particule elle-même soumise à différents paramètres (temps de vie,variation entre la naissance et la disparition ,vitesse et taille).
Les librairies créent donnent la possibilité à l'utilisateur de créer un objet de trois types possibles:
- Système de particules FEU (le plus intéressant à mon goùt)
- Système de particules EAU (pluie)
- Système de particules NEIGE
Plutôt qu'un long discours, voici un fichier zip qui contient tout ce dont vous avez besoin pour tester ce programme, et ça se passe ici
N'hésitez pas à me contacter si vous voulez en savoir plus.